NVIDIA推出DIFIX3D+: 单步扩散模型实现3D画质修
- 2025-08-03 18:16:11
- 426
这项由NVIDIA、新加坡国立大学、多伦多大学和VectorInstitute共同完成的研究发表于2025年3月,论文题目为"DIFIX3D+:Improving3DReconstructionswithSingle-StepDiffusionModels"。感兴趣的读者可以通过arXiv:2503.01774v1访问完整论文,也可以在https://research.nvidia.com/labs/toronto-ai/difix3d查看项目详情。
当你戴上VR眼镜,期待沉浸在一个逼真的虚拟世界中,却发现远处的建筑像被打了马赛克,近处的物体边缘模糊不清,这种体验无疑会让人大失所望。这正是目前3D重建技术面临的核心挑战——虽然在拍摄角度附近能呈现不错的效果,但一旦视角偏离太远,画面质量就会急剧下降,出现各种令人不快的视觉瑕疵。
NVIDIA领导的这个国际研究团队针对这一痛点,开发了一套名为DIFIX3D+的创新解决方案。这套系统的核心是一个叫做DIFIX的单步扩散模型,它就像一个专门修复3D渲染瑕疵的"数字化妆师"。与传统需要数百步计算的扩散模型不同,DIFIX只需要一步就能完成修复工作,速度快到可以实现近实时处理。
研究团队的创新之处在于将2D图像生成的强大能力巧妙地应用到3D重建的优化过程中。他们发现,当前最先进的2D扩散模型已经通过互联网规模的数据学习到了丰富的视觉知识,这些知识完全可以用来"指导"3D重建系统生成更真实的画面。通过这种方式,DIFIX3D+不仅能修复现有的瑕疵,还能在训练过程中逐步提升整个3D表示的质量。
实验结果显示,DIFIX3D+在多个评估指标上都取得了显著改进,其中FID分数平均提升了2倍,PSNR提升超过1分贝。更重要的是,这套系统既适用于神经辐射场(NeRF)也适用于3D高斯抛雪(3DGS),展现出了极强的通用性。在NVIDIAA100GPU上,DIFIX的单次处理时间仅为76毫秒,相比传统多步扩散模型快了10倍以上。
一、3D重建的"美颜"难题
要理解DIFIX3D+解决的问题,我们可以把3D重建比作用有限的照片重新构建一个房间的完整模型。当你只有几张从正面拍摄的房间照片时,你很难准确推测出房间背后或侧面的样子。现有的3D重建技术就面临这样的困境——它们在训练时只能看到有限的视角,因此在渲染全新视角时往往会出现各种问题。
传统的神经辐射场(NeRF)和3D高斯抛雪(3DGS)方法虽然在近距离、熟悉角度的渲染上表现出色,但一旦需要从极端新奇的视角观察场景,就会暴露出明显的短板。这些问题包括几何结构的错误推测、缺失区域的不当填充,以及整体画面的模糊不清。更糟糕的是,即使是在密集采样、光照条件良好的理想情况下,这些瑕疵依然难以完全避免。
问题的根源在于这些方法采用的是逐场景优化框架。每当处理一个new场景时,系统都需要从零开始学习,只能依赖有限的输入数据,无法利用对真实世界的广泛理解。这就像让一个从未见过房间的人仅凭几张照片就要画出房间的全貌——结果自然难以令人满意。
另一方面,大规模的2D生成模型(如扩散模型)通过训练于海量互联网图像,已经学会了真实世界图像的分布规律。这些模型具备强大的先验知识,能够合理地"脑补"缺失的细节,在图像修复、外延等任务上表现卓越。然而,如何将这些2D先验知识有效地提升到3D层面,一直是一个未解的难题。
现有的一些尝试主要是在3D优化的每一步都查询扩散模型,但这种方法存在明显的局限性。首先,它们主要针对物体中心的场景,难以扩展到大型环境。其次,频繁的扩散模型查询导致训练时间过长,实用性大打折扣。更重要的是,这些方法往往只在训练阶段使用扩散先验,而在最终推理时仍然会遇到残留的瑕疵问题。
二、DIFIX:单步修复的"魔法师"
DIFIX的设计理念可以比作一个经验丰富的照片修复师,他能够一眼识别出照片中的各种问题,并迅速给出修复建议。与传统需要反复调整的修复过程不同,DIFIX基于单步扩散模型,能够在极短时间内完成整个修复流程。
这个"魔法师"的工作原理相当巧妙。研究团队发现,3D渲染产生的带瑕疵图像,其退化分布与扩散模型训练时使用的加噪图像分布非常相似。这一发现为直接应用预训练扩散模型奠定了理论基础。具体来说,当NeRF或3DGS渲染出现瑕疵时,这些瑕疵的特征模式与在原始图像上添加特定水平噪声后的效果高度一致。
基于这一洞察,研究团队选择了SD-Turbo作为基础模型,并对其进行了专门的微调。他们将噪声水平设定为τ=200,这个数值是通过大量实验确定的最优参数。实验结果表明,这个噪声水平既能有效去除渲染瑕疵,又能保持原始图像的核心信息不被过度修改。
为了增强DIFIX的修复能力,研究团队引入了参考视图条件机制。这就像给修复师提供一张高质量的参考照片,让他能够更准确地理解应该如何修复当前的问题图像。通过修改自注意力层为参考混合层,DIFIX能够有效捕获跨视图的依赖关系,特别是在原始新颖视图质量严重退化的情况下,能够从参考视图中提取关键信息如物体、颜色、纹理等。
在训练过程中,DIFIX采用了多种损失函数来确保修复质量。除了基础的L2重建损失外,还引入了LPIPS感知损失来增强图像细节,以及基于VGG-16特征的Gram矩阵损失来获得更锐利的细节。这种多重约束机制确保了修复后的图像不仅在数值上接近真实图像,在视觉感知上也更加自然。
三、渐进式3D优化:从粗糙到精细的蜕变
DIFIX3D+的核心创新在于设计了一套渐进式的3D更新机制。这个过程就像修复一幅古老壁画——修复师不会一开始就处理最难的部分,而是先修复相对完整的区域,然后逐步扩展到损坏严重的地方。
这种渐进式方法的智慧在于认识到了扩散模型条件强度的重要性。当目标视角与输入视角相差太远时,扩散模型获得的条件信号较弱,容易产生不一致的修复结果。因此,DIFIX3D+采用了一种逐步逼近的策略:从参考视角开始,通过相机姿态插值逐渐靠近目标视角,每次只进行小幅度的调整。
具体的工作流程是这样的:系统首先使用参考视图优化3D表示,经过1500次迭代后,开始轻微扰动真实相机姿态朝向目标视图方向。每次扰动后,系统都会渲染新的视图,使用DIFIX进行修复,然后将修复后的图像加入训练集进行另一轮1500次迭代的优化。这个过程反复进行,直到达到目标视角。
这种渐进式更新带来了两个重要好处。首先,它确保了扩散模型始终能够获得足够强的条件信号,因为每次处理的都是与现有训练数据相对接近的视角。其次,它通过不断扩展可以多视角一致渲染的3D线索覆盖范围,逐步增强了3D表示在目标区域的准确性。
整个过程的精妙之处在于平衡了修复质量和一致性之间的关系。如果一次性跳跃到极端视角,修复结果可能出现严重的多视图不一致;如果步长太小,则需要过多的迭代次数。研究团队通过大量实验确定了最优的扰动步长,既保证了修复效果,又控制了计算成本。
四、实时后处理:最后的画龙点睛
即使经过了精心的渐进式优化,3D表示仍然可能存在一些细微的瑕疵。这主要是由于修复过程中引入的轻微多视图不一致,以及重建方法本身在表示尖锐细节方面的有限能力。为了解决这个问题,DIFIX3D+在推理阶段引入了实时后处理步骤。
这个最后的修饰步骤就像给已经完成的画作添加最后的亮点。由于DIFIX是单步扩散模型,它能够在76毫秒内完成一次修复操作,这个速度对于实时应用来说完全可以接受。相比之下,传统的多步扩散模型可能需要数秒时间,根本无法用于实时场景。
实时后处理的效果是立竿见影的。在所有感知质量指标上,这一步骤都带来了显著的改善,同时保持了较高的多视图一致性。这种设计的巧妙之处在于,它利用了人眼对静态图像质量的敏感性,同时避免了过度修改可能带来的时间不一致问题。
通过这种两阶段的设计——训练时的渐进式优化和推理时的实时修复,DIFIX3D+实现了质量和效率的最佳平衡。用户既能获得高质量的3D渲染结果,又不需要忍受过长的等待时间。
五、数据制作的精妙艺术
为了训练DIFIX模型,研究团队需要大量的"问题图像-完美图像"配对数据。这就像训练一个修复师,你需要给他看很多损坏的作品以及对应的完美原作。然而,获取这样的配对数据并不简单,需要巧妙的策略来模拟真实世界中可能出现的各种3D渲染瑕疵。
研究团队开发了多种数据生成策略。第一种是稀疏重建策略,特别适用于DL3DV数据集。他们使用每n帧训练3D表示,然后将剩余的真实图像与渲染的"新颖"视图配对。这种方法在相机轨迹变化较大的数据集上效果很好,能够产生显著偏离的新颖视图。
对于相机轨迹相对线性的数据集(如自动驾驶场景),团队采用了循环重建策略。他们首先在原始路径上训练NeRF,然后从水平偏移1-6米的轨迹渲染视图,再用这些渲染视图训练第二个NeRF,最后用第二个NeRF为原始轨迹渲染退化视图。这种方法巧妙地利用了两次重建过程中的累积误差,产生了更多样的瑕疵模式。
模型欠拟合策略则通过减少训练轮数(25%-75%的原始训练计划)来产生更明显的瑕疵。这种人为的"偷懒"训练方式能够生成比简单保留视图更严重的瑕疵,更好地模拟了极端情况下的渲染问题。
交叉参考策略适用于多相机数据集,通过只使用一个相机训练重建模型,然后在其他相机上渲染图像。这种方法通过选择具有相似图像处理管线的相机来确保视觉一致性,同时产生由视角差异导致的自然瑕疵。
通过这些精心设计的数据生成策略,研究团队为DL3DV数据集生成了80000对训练样本,NeRF和3DGS瑕疵的比例为1:1。这种多样化的训练数据确保了DIFIX模型能够处理各种类型的3D渲染瑕疵,具备强大的泛化能力。
六、全面实验验证:数据说话
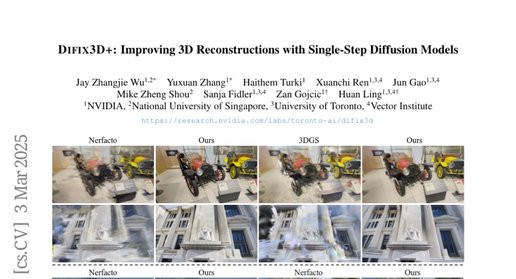
研究团队在多个具有挑战性的数据集上进行了全面的实验验证。在DL3DV和Nerfbusters数据集上的结果充分证明了DIFIX3D+的优越性能。与现有方法相比,DIFIX3D+在所有关键指标上都取得了显著改进。
在定量结果方面,DIFIX3D+表现异常出色。在Nerfbusters数据集上,使用Nerfacto作为基础的DIFIX3D+将PSNR从17.29提升到18.32,SSIM从0.6214提升到0.6623,LPIPS从0.4021大幅降低到0.2789,FID从134.65降低到49.44。使用3DGS作为基础时,改进同样显著:PSNR从17.66提升到18.51,FID从113.84降低到41.77。
在DL3DV数据集上的结果同样令人印象深刻。DIFIX3D+(Nerfacto)将FID从112.30降低到41.77,几乎实现了3倍的改进。这种大幅度的FID改进表明DIFIX3D+生成的图像在感知质量和视觉保真度方面都有质的飞跃。
更重要的是,DIFIX3D+展现出了优秀的通用性。无论是基于隐式表示的NeRF还是基于显式表示的3DGS,同一个DIFIX模型都能有效地进行修复。这种通用性大大提高了方法的实用价值,用户不需要为不同的3D表示方法训练不同的修复模型。
在汽车场景数据集上的实验进一步验证了方法的泛化能力。研究团队构建了一个内部真实驾驶场景数据集,包含三个具有40度重叠的相机。实验结果显示,DIFIX3D+在这个全新的场景类型上同样取得了显著改进,PSNR从19.95提升到21.75,FID从91.38降低到73.08。
研究团队还进行了详细的消融实验来验证各个组件的重要性。结果显示,仅仅将DIFIX直接应用于渲染视图就能带来一定改进,但会导致多视图不一致。通过渐进式3D更新,多视图一致性得到显著改善。最终的实时后处理步骤则进一步提升了感知质量,同时保持了良好的一致性。
七、技术创新的深层价值
DIFIX3D+的成功不仅在于其出色的实验结果,更在于其体现的技术创新思路。这项研究展示了如何巧妙地将2D生成模型的强大能力转移到3D领域,为后续研究提供了宝贵的启发。
传统的3D重建方法往往局限于优化框架内的几何和外观约束,缺乏对真实世界图像分布的深层理解。DIFIX3D+通过引入经过大规模数据训练的2D先验,有效弥补了这一不足。这种跨模态知识迁移的思路对于其他计算机视觉任务也具有重要的参考价值。
单步扩散模型的应用是另一个重要创新。在追求高质量生成的同时保持实时性能,这种平衡在实际应用中至关重要。DIFIX证明了经过适当微调的单步模型能够在特定任务上达到与多步模型相当甚至更好的效果,为扩散模型的实际部署提供了新的思路。
渐进式优化策略体现了对条件强度重要性的深刻理解。这种策略不仅适用于当前的3D修复任务,对于其他需要处理极端条件的生成任务也具有借鉴意义。通过逐步扩展条件覆盖范围,可以有效避免生成质量的急剧下降。
数据生成策略的多样性也值得关注。研究团队没有依赖单一的数据生成方法,而是针对不同类型的数据集设计了专门的策略。这种因地制宜的方法论对于其他需要大量配对数据的任务具有重要参考价值。
从工程实现角度来看,DIFIX3D+的模块化设计也值得称赞。整个系统可以与现有的NeRF和3DGS管线无缝集成,不需要对底层3D表示进行根本性修改。这种设计哲学大大降低了技术采用的门槛,有利于方法的广泛应用。
八、实际应用前景展望
DIFIX3D+的出现为多个实际应用领域带来了新的可能性。在虚拟现实和增强现实领域,高质量的3D重建是构建沉浸式体验的基础。DIFIX3D+能够显著提升从有限输入重建的3D场景质量,让用户在VR环境中获得更加真实的视觉体验。
在自动驾驶领域,准确的3D场景理解对于安全至关重要。DIFIX3D+展示的汽车场景增强能力表明,这项技术可以帮助提升车载3D重建系统的可靠性,特别是在相机覆盖不足的区域。这对于开发更安全的自动驾驶系统具有重要价值。
数字内容创作是另一个重要的应用方向。影视制作、游戏开发等行业经常需要从有限的实拍素材重建完整的3D环境。DIFIX3D+能够大大减少后期修正工作,提高制作效率的同时保证视觉质量。
在文化遗产保护方面,这项技术也具有独特价值。考古学家和文物保护专家经常需要从有限的照片或扫描数据重建古建筑或文物的3D模型。DIFIX3D+的修复能力能够帮助填补缺失的细节,为文化遗产的数字化保存提供更好的技术支持。
教育和培训领域同样受益匪浅。通过DIFIX3D+增强的3D重建技术,可以创建更加逼真的虚拟实验室、历史场景或地理环境,为学生提供更好的沉浸式学习体验。
随着技术的进一步发展,我们有理由期待DIFIX3D+在更多领域找到应用。特别是随着消费级设备计算能力的提升,这种实时修复技术有望集成到更多日常应用中,让普通用户也能享受到高质量3D内容的便利。
说到底,DIFIX3D+代表了3D重建技术发展的一个重要里程碑。它不仅解决了长期困扰该领域的画质问题,更重要的是展示了一种新的技术发展思路——通过巧妙地结合不同模态的先进技术,可以实现单一技术难以达到的突破。这种跨领域融合的创新方法论,很可能成为未来技术发展的重要趋势。
对于普通用户而言,这项技术的最大意义在于让高质量的3D体验不再是遥不可及的奢侈品。随着DIFIX3D+等技术的成熟和普及,我们有望在不久的将来看到更多令人惊艳的3D应用涌现,让数字世界与现实世界的边界变得更加模糊。毕竟,当技术能够如此真实地重现世界时,虚拟与现实的界限也就变得不那么重要了。
Q&A
Q1:DIFIX3D+是什么?它主要解决什么问题?A:DIFIX3D+是NVIDIA开发的3D重建画质增强系统,主要解决NeRF和3DGS等3D重建技术在渲染极端新视角时出现马赛克、模糊、几何错误等瑕疵的问题。它通过单步扩散模型DIFIX来修复这些瑕疵,让3D场景在任何角度都能呈现高质量画面。
Q2:DIFIX3D+会不会取代现有的NeRF和3DGS技术?A:不会取代,而是增强。DIFIX3D+设计为与现有NeRF和3DGS系统无缝集成的插件式解决方案,同一个模型就能同时修复两种不同3D表示的瑕疵,大大提升了实用性。
Q3:DIFIX3D+的处理速度如何?能用于实时应用吗?A:可以。DIFIX基于单步扩散模型,在NVIDIAA100GPU上单次处理仅需76毫秒,比传统多步扩散模型快10倍以上,完全可以用于VR、游戏等需要实时渲染的应用场景。
- 上一篇:福建南安一楼房发生爆炸
- 下一篇:加州州长说来抓我吧我才不怕
